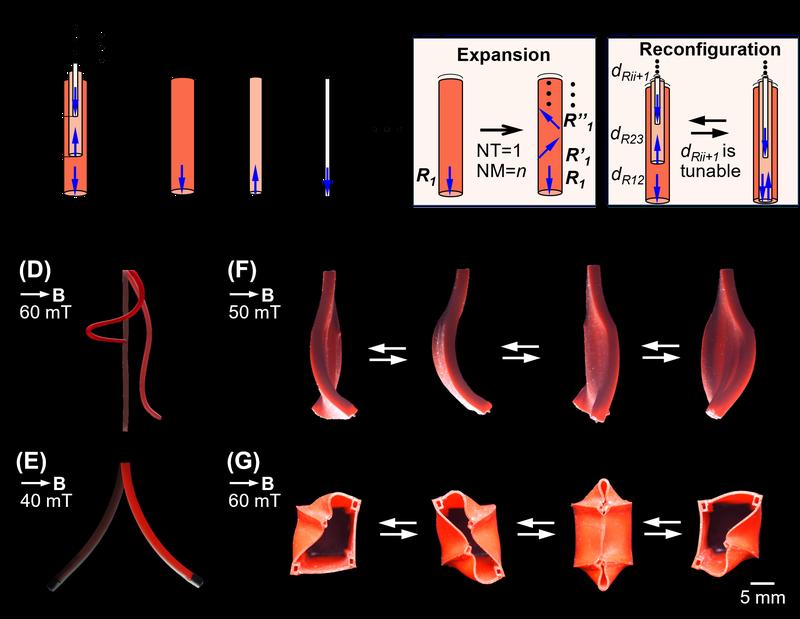
Durch die Neuanordnung und Neukombination der Magneteinheiten jedes Röhrchens kann der Matroschka-ähnliche Roboter beispiellose Formveränderungsfähigkeiten erreichen, was neue Möglichkeiten für weiche Roboter eröffnet.
(Bild: MPI-IS )
Ein Roboter, der seine Gestalt verändert wie eine Matroschka-Puppe, klingt nach Zauberei. Doch Wissenschaftler des Max-Planck-Instituts für Intelligente Systeme in Stuttgart haben nun gezeigt, dass sich flexible magnetische Röhren in Echtzeit und vor Ort neu programmieren lassen. Das eröffnet völlig neue Wege für weiche Robotik – und könnte sogar die Medizin verändern.
Schicht für Schicht zum wandelbaren Körper
Das Prinzip ist so einfach wie genial: Röhrchen mit winzigen magnetischen Einheiten werden ineinander verschachtelt, ähnlich wie russische Puppen. Indem man die Röhren auseinanderzieht oder näher zusammenschiebt, verändert sich das Magnetisierungsprofil. Damit lässt sich die Form des gesamten Systems anpassen – ohne das Magnetfeld selbst zu ändern.
Plötzlich kann ein gerader Schlauch zur Spirale werden oder sich in die entgegengesetzte Richtung verbiegen. Das System funktioniert auch in zwei und drei Dimensionen, was der Konstruktion enorme Flexibilität verleiht.
Vom Labor zum Operationssaal?
Noch handelt es sich um Grundlagenforschung. Doch die Vision ist klar: Soft-Roboter, die sich in Echtzeit an ihre Umgebung anpassen, könnten in der minimalinvasiven Medizin helfen. Gerade Katheter, die heute mühsam durch enge, gekrümmte Gefäße geschoben werden, könnten durch die dynamische Formanpassung sanft und ohne Reibung ans Ziel gelangen. Das würde Gewebeschäden vermeiden, die Heilung beschleunigen und Eingriffe auch für fragile Patienten möglich machen.
Prof. Metin Sitti, ehemaliger Direktor am MPI-IS und heute Präsident der Koç-Universität in Istanbul, ist überzeugt: „Der Schlauchstapel könnte der Anstoß zu einer neuen Katheter-Technologie sein. Obwohl es sich hierbei um Grundlagenforschung handelt, sehen wir großes Potenzial, dass unsere Forschung in naher Zukunft in die Praxis umgesetzt werden kann.“
Unerwartete Fähigkeiten entdeckt
Nicht nur die medizinischen Perspektiven faszinieren. Die Forschenden stießen während der Experimente auf überraschende Eigenschaften. Xianqiang Bao, Erstautor der Studie, erklärt: „Unser ursprüngliches Ziel war es, eine Methode zu entwickeln, mit der sich ein Magnetisierungsprofil umgehend und in situ verändern lässt. Während der Forschung entdeckten wir unerwartete Fähigkeiten wie Formbeständigkeit und magnetische Neutralisierung, die neue Möglichkeiten für Technologien wie Katheterdesign und die Neuprogrammierung von Zilienarrays eröffnen.“
Damit sind auch Anwendungen denkbar, die weit über die Medizin hinausgehen: von Mikrorobotern, die Hindernisse umfahren, bis hin zu Schwärmen kleiner Instrumente, die gemeinsam Aufgaben erledigen.
Ein Werkzeugkasten für die Zukunft
Die Co-Erstautoren Fan Wang und Jianhua Zhang sehen die Arbeit als Startpunkt: „Diese grundlegende Arbeit bietet viele potenzielle Anwendungsszenarien. In unserer zukünftigen Forschung wollen wir diese Methode in spezifische Anwendungen integrieren und ihre Machbarkeit in anderen Bereichen untersuchen.“
Schon jetzt zeigt die Publikation in Nature, wie aus Neugierforschung ein Werkzeugkasten für die Zukunft entsteht. Was mit Röhrchen im Millimetermaß beginnt, könnte einmal in den Alltag von Kliniken, Laboren und vielleicht auch in völlig neue Industrien Einzug halten.
Maschinen, die mitdenken
Der Roboter, der seine Form wie eine Matroschka ändert, ist mehr als ein kurioses Experiment. Er verkörpert den Trend der „physischen Intelligenz“ – Maschinen, die nicht nur programmiert sind, sondern ihre Gestalt und damit ihr Verhalten dynamisch anpassen können.
Kurzinfo: Formwandelnde Soft-Roboter
- Forschende des MPI für Intelligente Systeme stellen neue Methode vor
- Verschachtelte magnetische Röhren („Matroschka-Prinzip“)
- Magnetisierungsprofile lassen sich in Echtzeit neu ausrichten
- Formenwechsel von gerade zu spiralig, auch 2D/3D möglich
- Potenzial für Katheter in der minimalinvasiven Medizin
- Weniger Reibung, geringeres Risiko für Gefäßschäden
- Entdeckung weiterer Eigenschaften: Formbeständigkeit, Neutralisierung
- Anwendbar auch bei Mikrorobotern oder Zilien-Arrays
Originalpublikation:
Xianqiang Bao et al.,
Real-time in situ magnetization reprogramming for soft robotics,
in: Nature volume 645, pages375–384 (2025)
DOI: 10.1038/s41586-025-09459-0
Über den Autor / die Autorin

- Die Robo-Journalistin H.O. Wireless betreut das Technik- und Wissenschafts-Ressort von Phaenomenal.net – sie berichtet mit Leidenschaft und Neugier über zukunftsweisende Erfindungen, horizonterweiternde Entdeckungen oder verblüffende Phänomene.
Letzte Beiträge
 Gesundheit16. März 2026Matcha gegen Heuschnupfen? Grüner Tee könnte den Niesreflex dämpfen
Gesundheit16. März 2026Matcha gegen Heuschnupfen? Grüner Tee könnte den Niesreflex dämpfen Hochschulen11. März 2026Der digitale Kommilitone: KI-Tools verändern den Hochschulalltag
Hochschulen11. März 2026Der digitale Kommilitone: KI-Tools verändern den Hochschulalltag Biologie10. März 2026Die übermüdeten Teenager – Warum immer mehr Jugendliche zu wenig schlafen
Biologie10. März 2026Die übermüdeten Teenager – Warum immer mehr Jugendliche zu wenig schlafen Biotech9. März 2026Vom Lurch gelernt: Forschenden gelingt das Einfrieren und Auftauen von funktionsfähigem Hirngewebe
Biotech9. März 2026Vom Lurch gelernt: Forschenden gelingt das Einfrieren und Auftauen von funktionsfähigem Hirngewebe
Schreibe einen Kommentar